45°
手
右侧
正面
左侧
复原
量子 2 号
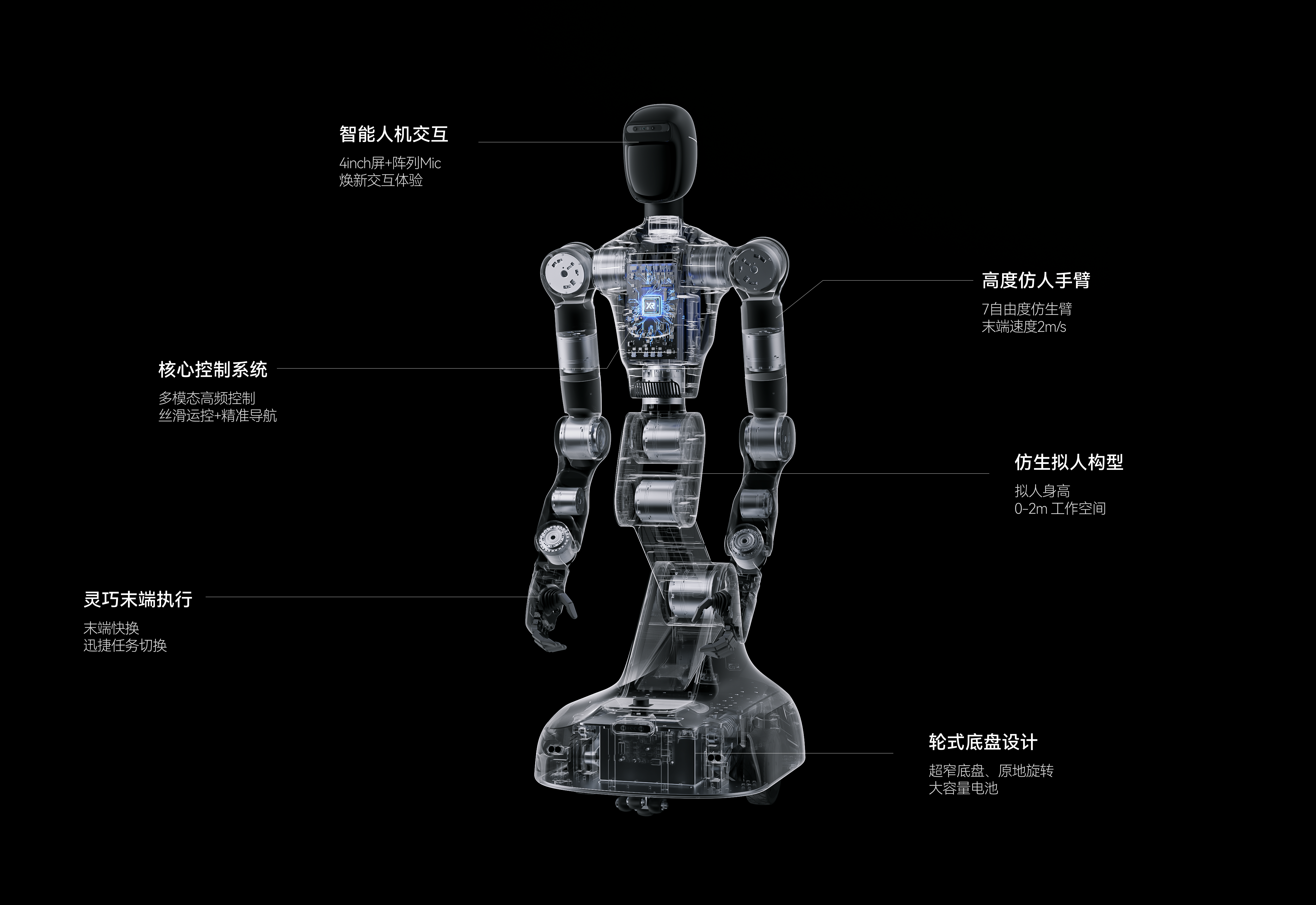
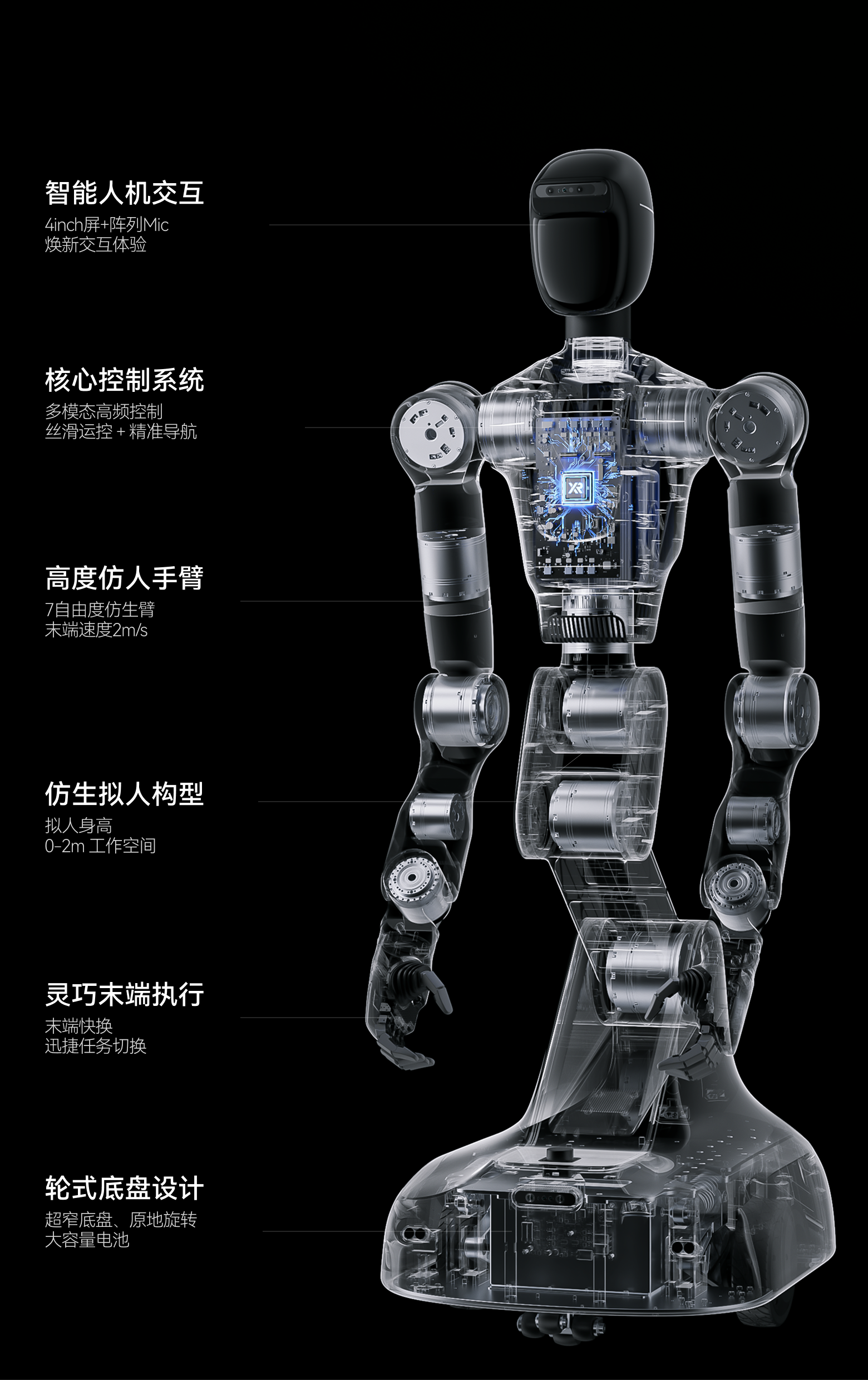
新一代通用轮式仿人形机器人
定义机器人物理交互新范式
以统一大模型为核心
打造跨场景、多形态的智能执行平台
围绕自研的 WALL-A 操作大模型,
实现从感知、理解到动作控制的全流程智能统一。
彻底突破传统机器人依赖规则与编程的局限,
实现在复杂环境中的高精度、自主化作业。
端到端架构
百亿级参数
跨任务跨场景泛化
QUANTA X2






量子 2 号
整体参数
全身自由度62DOF
身高164cm
工作高度0-2m
躯干自由度6
机械臂参数
单臂展765mm
重复定位精度± 0.03mm
末端速度1.8m/s
单臂额定负载6kg
最大双臂负载25kg
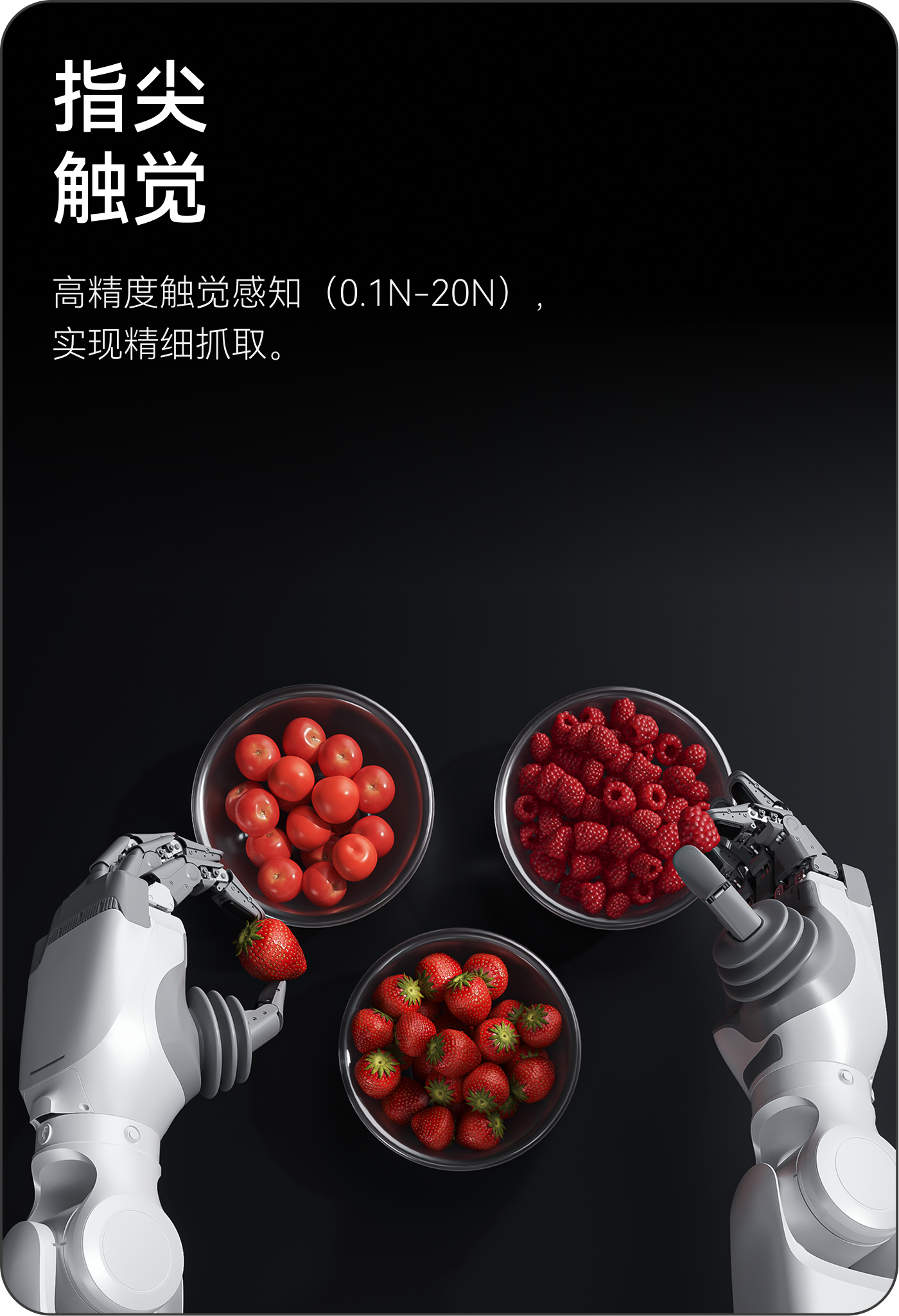
末端执行器参数
夹爪自由度2
灵巧手自由度20
底盘参数
移动速度1 m/s
底盘自由度2
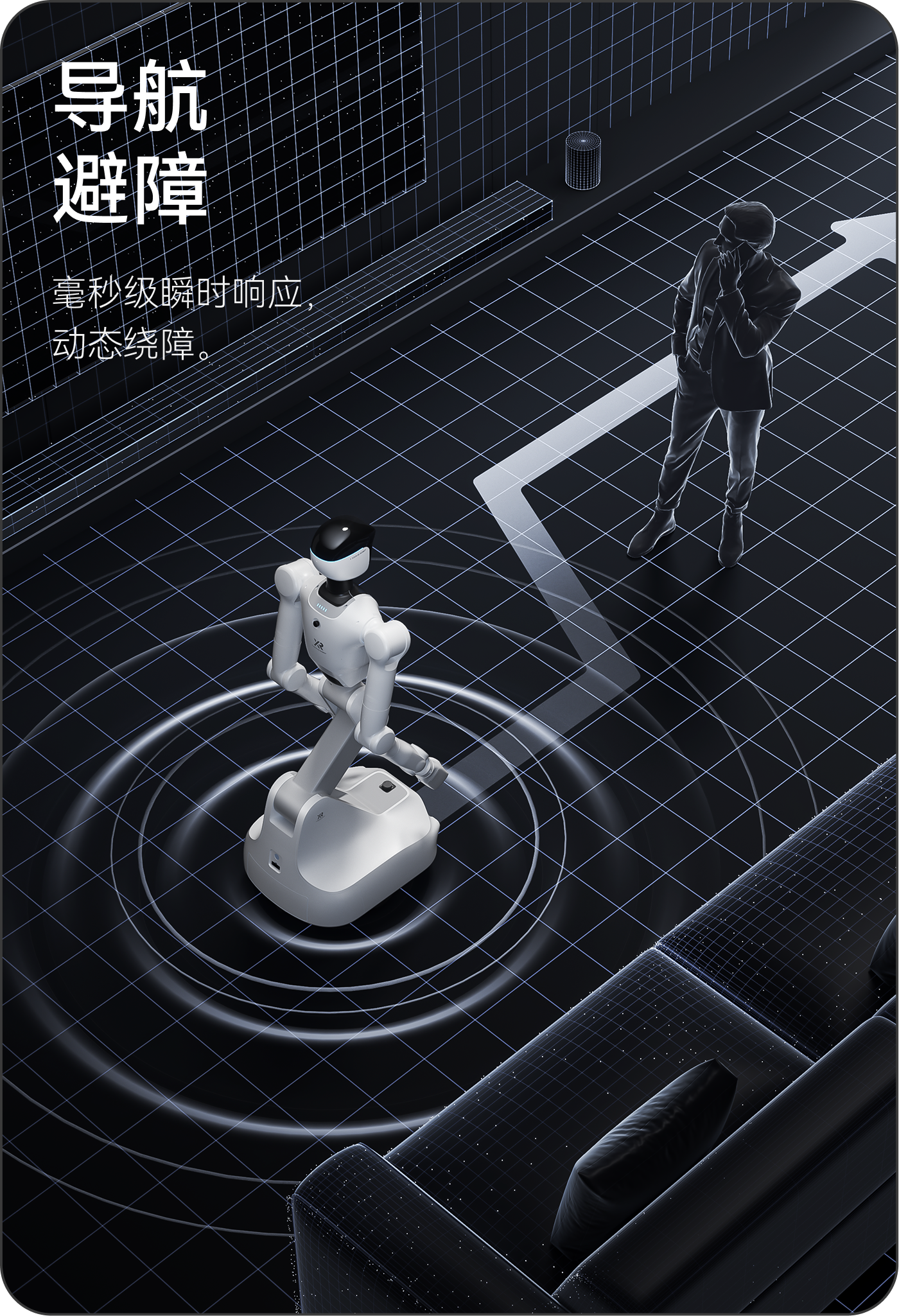
传感器配置
2D激光雷达1
超声波4
RGBD1
3D-TOF1
单点TOF1
红外1
搭载模型
模型全栈自研
WALL-A 操作大模型
参数规模百亿级参数




